


 We share this video thanks to a client that we recently worked with in the simulator. He agreed to share this video in hopes that it may bring attention to a critical phase of flight and create awareness so that others may learn. In this video the pilot is flying a non-precision localizer approach. The pilot is new to modern glass panels and autopilot use hence the simulator training. This pilot also had not flown IFR since Stabilized Constant Descent Angles were introduced several years ago. In this video the pilot has the autopilot engaged and had just levelled off at the last approach step-down altitude prior to the final approach fix. Being a high workload situation with new to him avionics, he does not increase power when the aircraft levels. While the autopilot maintains altitude the airspeed begins bleeding off until the stall warning activates. What is more interesting is the nine second reaction time to the stall horn. A SCDA on this approach would have avoided the level off and need to add power. This delayed reaction time is something that is very common when faced with an unexpected audible warning or emergency. One of the contributing factors to this may be the pilot's unfamiliarity with the various audible tones that this particular avionics suite gives off. Altitude alerts, system warnings, stall warning and autopilot disconnect tones, all sound slightly different but also very similar. It is understandable why an unexpected stall horn may go unnoticed. Scenarios such as this give a prime example of why recurrent training is essential to maintaining proficiency and the value of flight simulation. It also goes to show why policies and procedures change over time with respect to how pilots operate. In recent years there has been a push toward the use of Stabilized Constant Descent Angle Angle (SCDA) on non-precision IFR approaches. A SCDA approach is associated with approaches that do not employ the vertical guidance associated with ILS and LPV approaches. Traditionally, Localizer, NDB approaches involved multiple step-downs which necessitated multiple engine power changes with each descent and level off. Stabilized constant descents mean that the aircraft begins its final descent and a specified point on the approach at a predetermined vertical speed based on that aircraft’s groundspeed. A stabilized constant descent enhances safety by eliminating multiple power changes and reducing pilot workload in addition to a higher likelihood of arriving at approach minimums configured and in a position to execute a safe and stable landing. Taken one step further, the use of a SCDA allows the pilot to treat the Minimum Descent Altitude (MDA) much like a Decision Height (DH). While the MDA is still an altitude that is not to be descended below, it means that rather than levelling at MDA several miles from the missed approach point, a pilot using an SCDA may opt to execute the missed approach upon reaching the MDA, regardless of mileage remaining to the runway. This change in execution creates procedural similarities between approaches with vertical guidance and those non-precision approaches without vertical guidance which simplifies pilot workload and creates commonalities between the most venerable time in any approach procedure, the missed approach. Additional input on the topic from airline pilot and flight instructor, Scott JacksonIt takes much longer to create a complete mental picture of the current state of everything when using a PFD, as it displays energy in a manner that requires consciously comparing it to a desired value and that takes mental processing power. Much quicker and easier to glance at a steam gauge and just know that it’s no longer at the desired three-o’clock position and also instantly recognizing whether we are fast/ slow and what the trend is by only a moment’s monitoring of the needle movement. Personally, transitioning to glass after 10,000 hours of chasing and corralling a panel of steam gauges, it gave me a headache and wasn’t at all intuitive The SCDA should in theory allow a lower MDA and that may happen in the future. Where it’s not as easy as suggested is when the groundspeed changes during the final descent and-if in cloud-it nearly always does as we drop out of the cloud base. Therefore, it requires cross checking our crossing altitudes at each of those final-descent checkpoints and making minor changes in power in an attempt to reacquire the desired SCDA and hope that it’s enough to cross the next one at the right altitude and then figure out what power setting might work thereafter. There is another issue which has to do with getting ground contact sooner on a “dive and drive” approach which helps with a ragged ceiling but this has its own problems. There’s no question that SCDA approaches are safer and it’s the Stabilized that makes it so. I merely wish to point out that they are rarely as stabilized as following a VPath of Glideslope beam 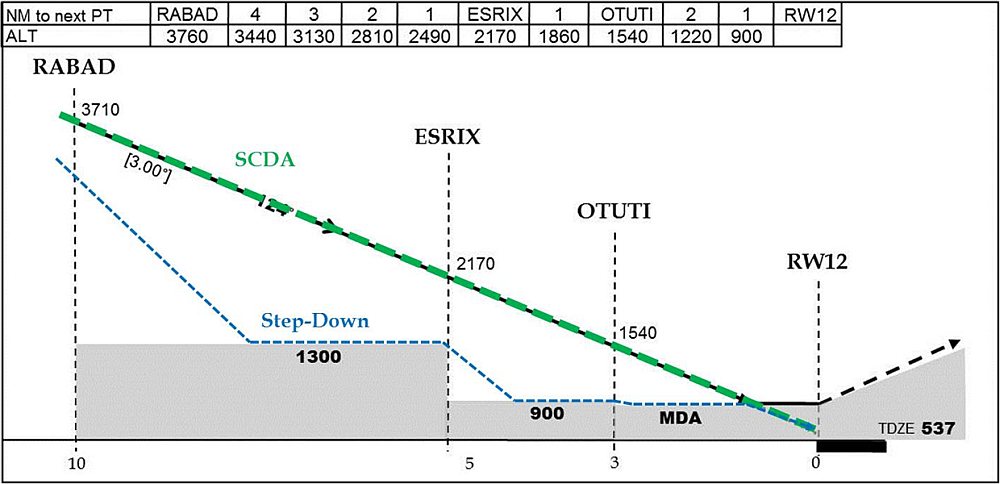 Transportation Safety Board: RECOMMENDATION A12-02 Stabilized Constant Descent Angle (SCDA)
Written By: Ryan Van Haren (Cardinal Aviation Coach)
Kevin Maher
2/1/2020 05:33:58
Ryan... the other thing this video dramatically shows is the value if two pilot crews-PF and PM. Without an effective PM, single pilot IFR is an order of magnitude riskier. This is why I believe single pilot airliners are far far further away than many people think. It is about more than the pilot having a heart attack.
Pilot In The Video
2/1/2020 08:49:12
Just reading the article in the context of transitioning into a cockpit with this much technology. There used to be only one audible warning, the stall horn and there was no question what it was. Now I’m trying to filter through and identify each one and that adds to the delay in identifying the stall. Through this error I think it ultimately was a good lesson to learn. I never imagined I wouldn’t recognize a stall horn.
JOHN SWALLOW
2/1/2020 09:28:32
I never had any trouble with the "Dive and Drive" non-precision approaches 'back in the day'.
WAYNE CAVE
2/6/2020 20:50:44
SCDA is certainly mandatory on the IFR flight test. Here is the bold print from the latest Flight Test Standards:
John Swallow
2/6/2020 21:01:33
"...will be considered a major error"... Comments are closed.
|
AuthorThe Cardinal Aviation Blog is a compilation of stories, tips, tricks and experiences from our Clients and Coaches. Some entries have a valuable learning lesson in them and some are to share some of what we are fortunate enough to experience when we fly. CategoriesAll ATC Tips Audio Briefings General Commentary IFR Tips Interesting Finds Podcast Related Content Text Archives
November 2021
|
Search by typing & pressing enter
 RSS Feed
RSS Feed